在2017年发布的自动驾驶安全技术报告中,谷歌旗下自动驾驶公司Waymo系统性地阐述了其核心技术支柱——自动识别技术的开发路径、核心构成与安全理念。这份报告不仅是对其技术能力的展示,更是对整个行业安全标准与责任的一次深刻探讨。自动识别技术,作为自动驾驶车辆的“眼睛”与“大脑”感知部分的核心,其可靠性直接决定了系统的安全上限。
Waymo的自动识别技术是一个复杂的多传感器融合系统,旨在实现对车辆周围360度、远距离、高精度的环境感知。其开发核心围绕以下几个层面展开:
1. 多模态传感器套件的协同感知
Waymo并未依赖单一传感器,而是构建了包括激光雷达(LiDAR)、毫米波雷达、摄像头和超声波传感器在内的冗余套件。每种传感器都有其独特的优势与适用场景:高分辨率激光雷达生成精细的3D点云图,精确描绘物体的形状与距离;摄像头提供丰富的色彩与纹理信息,用于识别交通信号灯、标志及路面标线;毫米波雷达则在恶劣天气(如雨、雾)中表现稳定,擅长探测移动物体的速度。开发的重点在于硬件性能提升(如定制化激光雷达拥有更远的探测距离和分辨率)与深度融合算法,确保在不同光照、天气和复杂路况下,系统都能获得可靠、一致的感知数据。
2. 基于深度学习的物体识别与分类
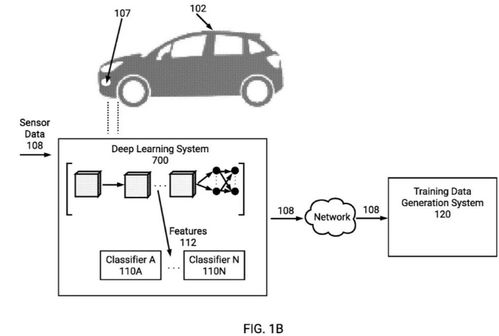
海量的感知数据需要强大的“大脑”进行解析。Waymo投入巨资开发了基于深度神经网络(DNN)的识别算法。这些算法经过数百万英里真实道路和数十亿英里模拟里程的训练,能够实时、准确地识别并分类各种道路使用者:从车辆、行人、骑行者到宠物、杂物,甚至预测他们的行为意图(如行人是否要横穿马路)。报告强调,识别技术不仅要知道“那里有什么”,更要理解“它接下来可能会做什么”。这是实现安全导航和防御性驾驶策略的基础。
3. 高精地图与实时感知的融合定位
Waymo为其运营区域制作了厘米级精度的高清地图,包含车道线、交通标志、路缘石等静态环境的详细信息。自动识别系统将实时传感器数据与高清地图进行比对,实现超越GPS的精准定位(厘米级)。这好比为车辆提供了一个“记忆中的完美世界”作为参考基准,使得车辆能够更准确地理解自身在车道中的精确位置,并提前预知前方的道路几何形状,即使在传感器暂时受遮挡时也能保持稳定的定位。
4. 持续学习与仿真测试的闭环开发
技术的开发并非一蹴而就。Waymo建立了一个庞大的“持续学习与改进”系统。每一段真实路测数据,尤其是遇到的“边缘案例”(如不遵守交规的行为、罕见天气、特殊物体),都会被记录并用于重新训练和优化识别模型。更重要的是,Waymo构建了规模庞大的模拟仿真平台,可以在虚拟世界中以千倍、万倍于现实的速度,反复测试和验证识别系统在无数极端场景下的表现,从而在技术部署前就将潜在风险降至最低。
安全至上的开发哲学
贯穿整个报告的核心是“安全第一”的理念。自动识别技术的每一个环节——从硬件冗余设计、软件算法鲁棒性到数据验证流程——都以实现“失效可操作”为目标。即当某个传感器或算法模块出现异常时,系统能通过冗余配置和交叉验证及时发现,并降级到仍能安全运行的状态。
Waymo 2017年报告中所展现的自动识别技术开发,是一个集尖端硬件、先进人工智能、海量数据与严谨安全工程于一体的系统性工程。它不仅是当时Waymo技术领先地位的体现,也为整个行业如何构建可靠、安全的感知系统树立了一个清晰的标杆,标志着自动驾驶技术从概念验证向安全可靠的产品化阶段迈出了坚实的一步。